

由于建筑遮挡等因素,民用定位精度低于10米GPS室外定位不能为室内定位服务提供高精度的服务。同时,伴随着5G随着技术的发展,新的编码 *** 、波束赋形、大规模天线阵列和毫米波频谱为高精度距离测量提供了技术支持。因此,室内定位研究已成为无线传感器 *** 服务的重要分支。
室内定位研究中常用的传感器包括:Wi-Fi、蓝牙、RFID、红外、ZigBee等等。本文我们将以此为准RFID以技术为基础,介绍室内定位原理。
1.RFID定位原理
如图1所示,目前的传统RFID室内定位跟踪系统是一种基于计算机的 *** RFID数据采集,RFID数据处理和传输,GIS由空间分析和查询等技术形成的智能技术系统。

图1 基于RFID室内定位系统结构图
其定位依据是结合RFID采用定位算法计算信号的接收信号强度、相位等参数。Saad用卡尔曼滤波器计算标签的位置[1],以捕获标签的相位信息。Alippi其他人使用安装在固定位置的读写器天线,通过旋转扫描环境中的标签,获得标签的角度范围和接收信号强度,并使用贝叶斯 *** 计算标签的位置[2]。Choi其他人提出了一种利用目标标签干扰参考标签信号强度定位标签的 *** [3]。清华大学刘云浩教授的团队提出了一种基于无源的 *** RFID标签信号强度高阶变换的高精度室内定位 *** 可达厘米级[4-5]。
2.常见的定位算法
2.1 三边测距法
如图2所示,Hightower等提出的SpotON该系统[6]是该类算法的典型代表。该系统以3个或3个以上的读写器作为基站,通过三角测距计算标签位置[7],记录每个读写器读取的标签接收信号强度。
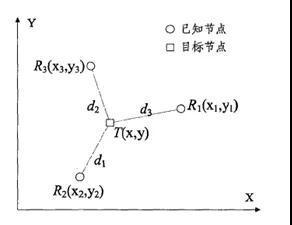
图2 SpotON系统原理示意图
2.2 LANDMARC定位算法
Landmarc[8]近年来很受欢迎RFID定位系统。其主要思想是引入参考标签。读写器和参考标签分别部署在室内的几个固定位置,通过比较参考标签和目标标签的接收信号强度来计算目标标签的位置。然后,许多学者Landmarc改进系统以提高其定位精度。Jin等人在Landmarc为了提高定位效率[9],系统介绍了邻居节点的概念。Chattopadhyay通过定量分析参考标签的排列 *** 和密度,指出Landmarc系统的定位效果取决于标签的放置方向,要求标签按同一方向放置,或者标签天线本身具有良好的全向性[10]。
同时,该团队利用神经 *** 对Landmarc系统改进,通过预先安排的目标标签和参考标签的信号强度,训练神经 *** ,利用训练好的神经 *** 计算未知目标标签的位置[11]。Choi等待人员在系统中引入信号强度修正 *** ,使用修正后的目标标签和参考标签的信号强度进行位置计算[12]。香港科技大学的赵戈阳等人提出了基于虚拟参考标签的建议VIRE(Virtualreferenceelimination)算法,通过线性插值方式结合实际参考标签的位置信息和信号强度,估计虚拟参考标签的位置信息及信号强度,实现室内传输环境的细粒度化[13]。
2.3 到达时间定位算法(TOA)
如图3所示,Xu等人利用到达时间法跟踪人员的运动轨迹[14];Wang等人则是将L-MUSIC *** 与到达时间法相结合,实现标签定位[15]。但到达时间法存在一些缺陷:
(1)由于室内定位的应用场景通常较小,从标签到读写器的距离较近,短距离测距需要较高的时间精度;
(2)读写器与标签之间需要精确同步;
(3)RFID通信速率低,使时间戳准确(Timestamp)很难加入。
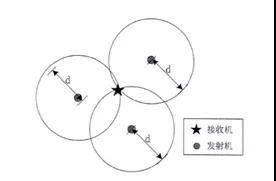
图3 TOA算法原理示意图
除上述 *** 外,波达角(AOA)、波达方向(DOA)等室内定位算法也是研究热点,能够提供较好的定位精度。目前,室内定位应用正处于从研究室走向实际应用阶段,如香港中文大学的室内定位技术在菜鸟驿站中开始进行应用,如何从理论算法的研究到工业生产应用是研究学者仍需解决的问题。
参考文献:
[1] De Jesus N S,Marciano J S. Enhancing theaccuracy of direction-of-arrival (DoA) estimates of passive UHF RFID tagsignals using adaptive filtering[C]. 10th International Conference onInformation Sciences Signal Processing and their Applications,169-172,2010.
[2] Saad S S,Nakad Z S. A standalone RFID indoorpositioning system using passive tags [J]. IEEE Transactions on IndustrialElectronics,vol.58,no.5, 1961-1970,2011.
[3] Choi J S,Lee H,Engels D W,et al. Passive UHFRFID-based localization using detection of tag interference on *** art shelf [J].IEEE Transactions on Systems,Man,and Cybernetics,vol. 42,no.2,268-275,2012.
[4] L. Yang,Y. Chen,X.-Y. Li,C. Xiao,M. Li,andY. Liu. Tagoram: Realtime Tracking of Mobile RFID Tags to High Precision UsingCOTS Devices. In Proceedings of ACM MobiCom,2014.
[5] L. Shangguan,Z. Li,Z. Yang,M. Li,Y. Liu,and J. Han. OTrack: Order Tracking for Luggage in Mobile RFID Systems.Transactions on Parallel and Distributed Systems,vol. 25,2114–2125,2014.
[6] Higlitower J,Want R,Borriello G. SpotON: Anindoor 3D location sensing technology based on RF signal strength [J]. UW-CSE 00-02-02,University of Washington,Department of Computer Science and Engineering,Seattle,WA,February 2000.
[7] Hightower J,Vakili C,Borriello G,et al.Design and calibration of the spoton ad-hoc location sensing system[J]. UW CSE00-02-02,University of Washington,Department of Computer Science andEngineering,Seattle,WA, 2001.
[8] Ni L M,Li Y,Lau Y C,et al. LANDMARC: indoorlocation sensing using active RFID [J]. In Proceedings of the First IEEEInternational Conference on Pervasive Computing and Communications,407-415,2003.
[9] Jin G,Lu X,Park MS. An indoor localizationmechani *** using active RFID tag[C]. IEEE International Conference on SensorNetworks,Ubiquitous,and Trustworthy Computing,1-4,2006.
[10] Chattopadhyay A,Harish A R. Analysis of UHFpassive RFID tag behavior and study of their applications in low range indoorlocation tracking[C]. IEEE Antennas and Propagation Society InternationalSymposium,1217-1220,June 2007.
[11] Chattopadhyay A,Harish A R. Analysis of lowrange Indoor Location Tracking techniques using Passive UHF RFID tags[C]. IEEERadio and Wireless Symposium,351-354,2008.
[12] Choi J S,Lee H,Elmasri R,et al.Localization systems using passive UHF RFID[C]. Fifth International JointConference on INC,IMS and IDC,1727-1732, 2009.
[13] Zhao Y,Liu Y,Ni L M. VIRE: Active RFID-basedlocalization using virtual reference elimination[C].International Conference onParallel Processing,10-14, 2007.
[14] Xu B,Gang W. Random sampling algorithm inRFID indoor location system[C]. In Third IEEE International Workshop onElectronic Design,Test and Aplications (DELTA),168-176,2006.
[15] Wang J S,Shen Z X. An improved MUSIC TOAestimator for RFID positioning[C]. IEEE Radar Conference,478-482,2002.

【本文为51CTO专栏作者“中国保密协会科技分会”请联系原作者转载原稿
戳这里,看该作者更多好文
版权声明
本文仅代表作者观点,不代表本站立场。
本文系作者授权发表,未经许可,不得转载。